工业 | 揭秘机器视觉行业定位技术路径分析
发布时间:2019-10-21 06:45来源: 未知1.技术路线概述
机器视觉行业中,3D成像技术通过红外发射、接收模组,实现对拍摄对象位置、细节等深度数据采集,真正还原真实场景。目前主要的实现手段有三种:
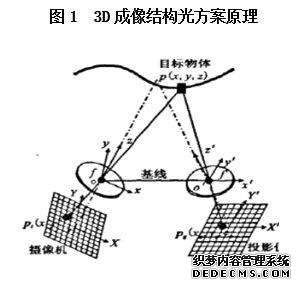
(1)单目结构光,是基于光学三角形测量原理,根据光照到物体上的光斑变形程度来测量物体的远近角度,比方说光斑直射时,其大小反映了拍摄对象的远近,而当光线斜射时,椭圆光斑焦距则反映拍摄对象与镜头切面角度,摄像头收集变化后的光斑数据,通过算法来重构物体模型。代表公司有苹果(收购最大的结构光技术公司Prime Sense)、微软Kinect-1、英特尔RealSense、GoogleProject Tango等,目前创业公司几乎都沿用此技术路线。
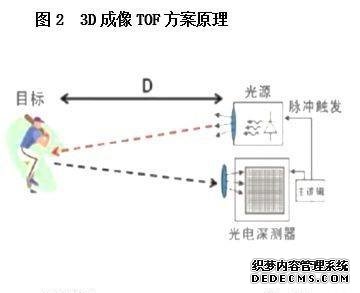
(2)飞行时间法(TOF),是飞行时间法3D成像,是通过给目标连续发射激光脉冲,然后用传感器接收从反射光线,通过探测光脉冲的飞行往返时间来得到确切的目标物距离。代表公司微软Kinect-2。